Thank you for taking part in our survey on Cognitive Whole-Body Control for Compliant Robot Manipulation. The results are summarized below.
- The majority of all participants wants to exploit compliance to simplify task programming and enhance robustness and dexterity.
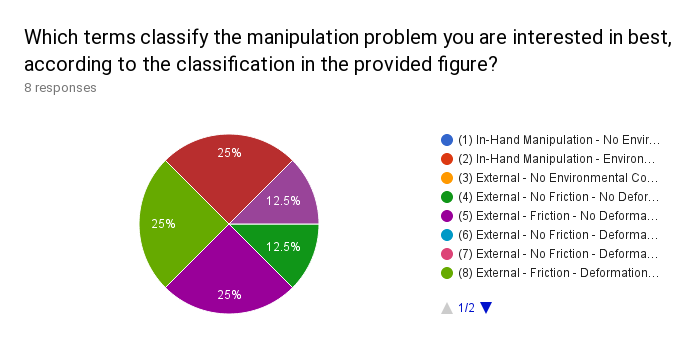
- Most people are concerned with the contact-rich tasks of wiping, cutting, and peg-in-hole.
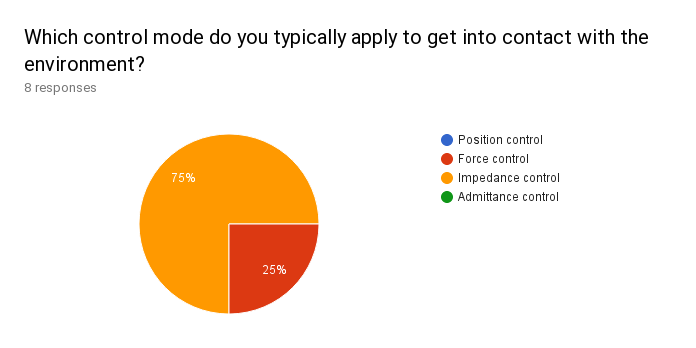
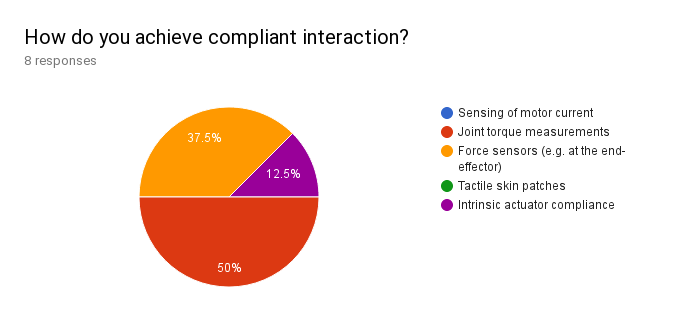
- The most common way to interact compliantly is the use of impedance control via joint torque sensors.
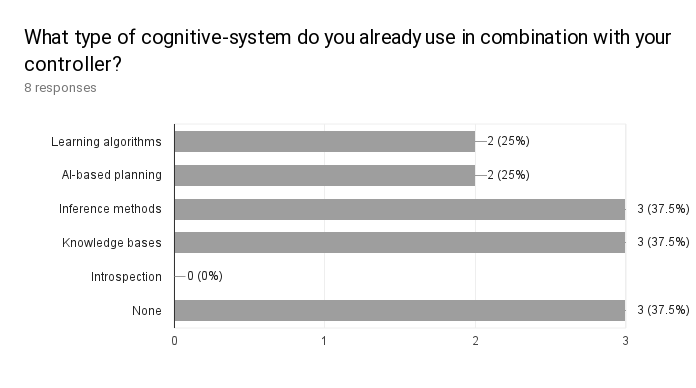
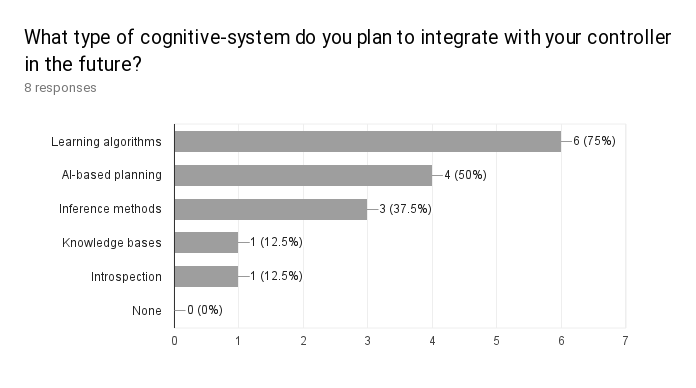
- While several researchers have already integrated knowledge-bases and inference mechanisms into their control algorithms, machine learning dominates the current research trend which correlates to the presentations of the workshop.