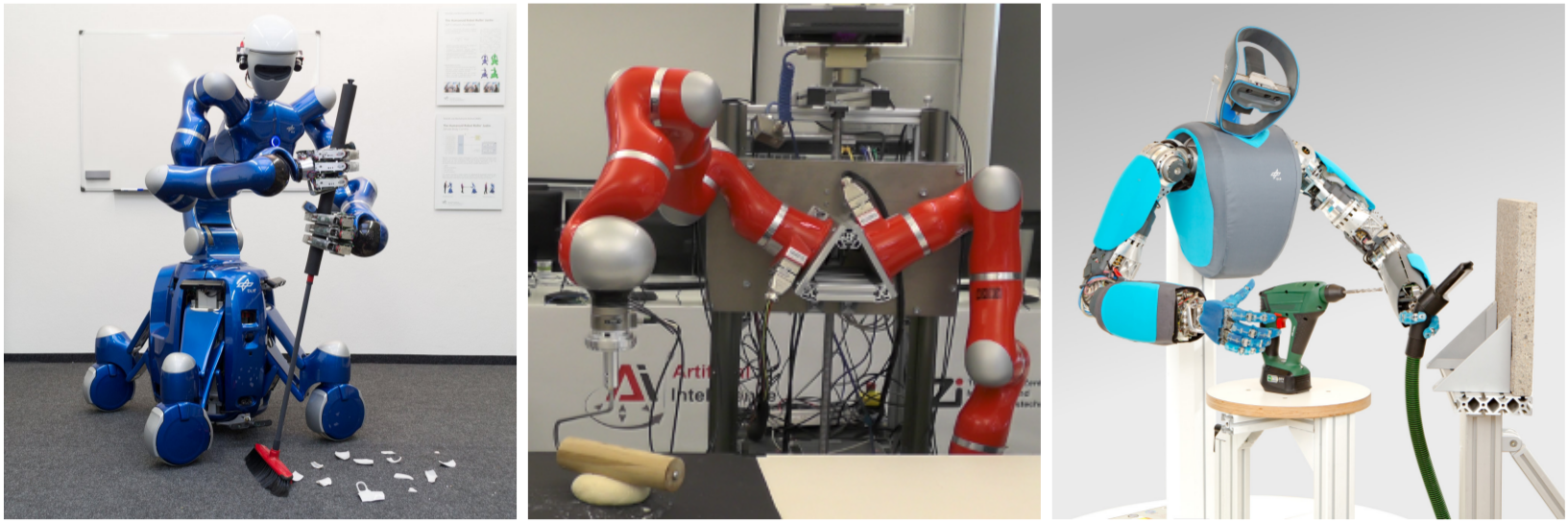
In the future, universal service robots are envisaged to catch up with the human ability to master almost every task in various domains, including everyday manipulation such as domestic cleaning, preparing meals, or co-operative manufacturing, as seen in the figure below. These tasks demand both human-like cognitive capabilities and dexterous manipulation skills.
- Prior to the task execution, the robot has to reason about the task decomposition, plan whole-body motions, and parameterize the controller according to the nature of contact.
- During task execution, the robot must be able to establish soft physical contact with its environment, in order to properly handle the given tasks.
- At last, the robot has to (numerically) interpret the effect of its motions and physical interactions and provide semantic feedback regarding the quality of the task execution.
To tackle these issues, the combined efforts of the robotics community and the Artificial Intelligence (AI) area are required. Accordingly, the aim of the Workshop on Cognitive Whole-Body Control for Compliant Robot Manipulation (COWB-COMP) is to foster the collaboration between the two complementary research fields, in order to create a common understanding of compliant manipulation tasks and their demands to the cognitive components and control strategies of compliant robots.